


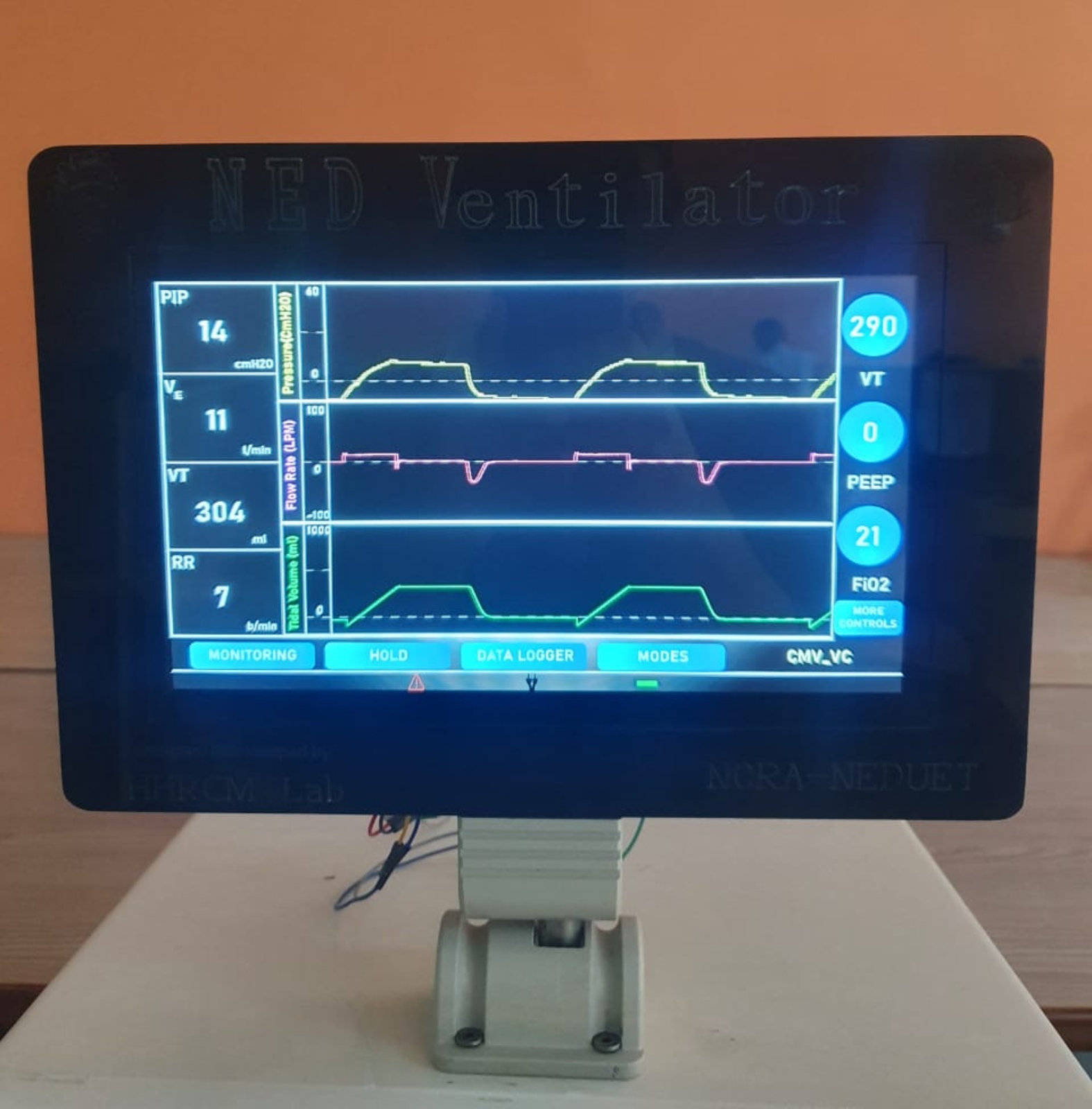
1. NED Ventilator
This product is indigenously designed and developed during strict lockdown in response to COVID-19 pandemic situation with an objective of contributing to nation’s cause by locally developing a ventilator solution. The design is based on desired mixture of controlled-compressed air/oxygen switching. The design will be able to obtain benchmark pressure profiles, tidal volume and flowrate to be maintained at patient lungs along with required tidal volume and flowrate depending upon the condition of patients and required mode. The design is following the standards of UK govt. and is able to follow all the required modes of medical ventilation such as PSM (BiPAP & CPAP) and MM (CMV, CMV-PC, CMV-VC, SIMV-PC and SIMV-PC). Brochure